Robotic Planning and Kinematics
1. Sensor-Based Motion Planning
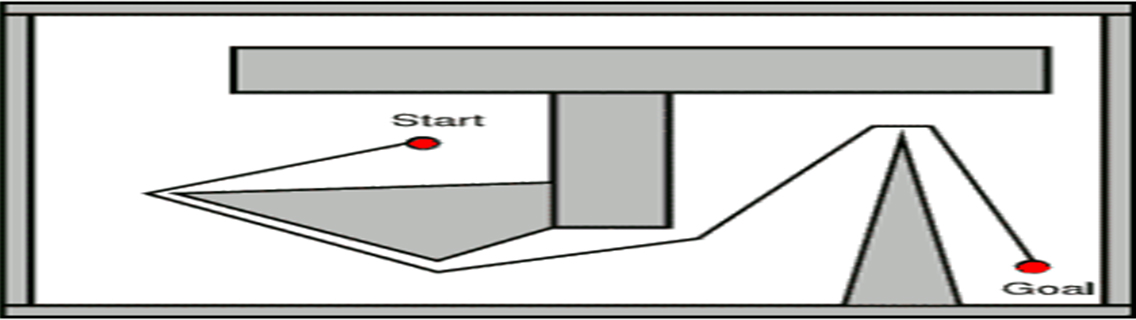
Motion planning is an important and common problem in robotics. In its simplest form, the motion planning problem is: how to move a robot from a “start” location to a “goal” location avoiding obstacles.
Robot Assumptions
- knows the direction towards the goal,
- knows the straight-line distance between itself and the goal,
- does not know anything about the obstacles (number, location, shape, etc.)
- has a contact sensor that allows it to locally detect obstacles,
- can move either in a straight line towards the goal or can follow an obstacle boundary (possibly by using its contact sensor), and
- has limited memory in which it can store distances and angles.
Environment Assumptions
- the workspace is bounded
- there are only a finite number of obstacles
- the start and goal points are in the free workspace
- any straight line drawn in the environment crosses the boundary of each obstacle only a finite number of times. (This assumption is easily satisfied for “normal objects”.)
Compute Line Through Two Points
Input: two distinct points P1 = (x1,y1) and P2 = (x2,y2) on the plane
Output: parameters (a,b,c) defining the line {(x,y) | ax + by + c = 0} that passes through both P1 and P2.
Normalize the parameters so that a2 + b2 = 1.
Using Matlab
function [a,b,c] = line_points(p1,p2)
A = [p1(1,1) p2(1,1)];
B = [p1(1,2) p2(1,2)];
if (p1(1,1) == p2(1,1))
a = 1;
b = 0;
c = -p1(1,1);
else
p = polyfit(A,B,1);
slope = p(1,1);
intercept = p(1,2);
a = slope/sqrt(slope^2 + 1);
b = -sqrt(1 - a^2);
c = intercept • -b;
if c < 10^-10
c = 0;
end
end
disp(['ax + by + c = 0'])
end
Compute Distance Point To Line
Input: a point q and two distinct points P1 = (x1,y1) and P2 = (X2,Y2) defining a line.
Output: the distance from q to the line defined by P1 and P2.
Using Matlab
function [distance] = d_pl(p1,p2,Q)
%P1,P2,Q are written as [x,y] format
A = [p1(1,1) p1(1,2) 0];
B = [p1(1,1) p2(1,2)0];
Q = [Q(1,1) Q(1,2) 0];
AB = A - B;
BQ = Q - B;
ABBQ = cross(AB,BQ);
distance = norm(ABBQ)/norm(AB);
end
Compute Distance Point To Segment
Input: a point q and a segment defined by two distinct points (P1,P2).
Output: the distance from q to the segment with extreme points (P1,P2).
Using Matlab
function [distance] = d_ps(p1,p2,Q)
%P1,P2,Q are written as [x,y] format
A = [p1(1,1) p1(1,2)];
B = [p2(1,1) p2(1,2)];
Q = [Q(1,1) Q(1,2)];
AB = norm(A - B);
AQ = norm(A - Q);
BQ = norm(B - Q);
if dot(A - B, Q - B) • dot(Q - A, Q - A) >= 0
x = [A,1;B,1;Q,1];
distance = abs(det(x))/AB;
else
distance = min(AQ,BQ);
end
end
Compute Distance Point To Polygon
Input: a polygon P and a point q.
Output: the distance from q to the closest point in P, called the distance from q to the polygon.
Using Matlab
function [distance] = d_pp(P,Q)
%P is written as [x1,y1;x2,y2;...] format and Q is written as [x,y] format
n = length(P);
i = 1;
d = [];
while i < n
A = [P(i,1) P(i,2)];
B = [P(i + 1,1) P(i + 1,2)];
Q = [Q(1,1) Q(1,2)];
AB = norm(A - B);
AQ = norm(A - Q);
BQ = norm(B - Q);
if dot(A - B, Q - B) • dot(B - A, Q - A) >= 0
X = [A,1;B,1;Q,1];
x = sym(X);
distance = abs(det(x))/AB;
else
distance = min(AQ,BQ);
end
d(1,i) = distance;
i = i + 1:
end
A = [P(1,1) P(1,2)];
B = [P(n,1) P(n,2)];
Q = [Q(1,1) Q(1,2)];
AB = norm(A - B);
AQ = norm(A - Q);
BQ = norm(B - Q);
if dot(A - B,Q - B) • dot(B - A,Q - A) >= 0
X = [A,1;B,1;Q,1];
x = sym(X);
distance = abs(det(x))/AB;
else
distance = min(AQ,BQ);
end
d(1,n) = distance;
distance = min(d);
end
Compute tangent Vector To polygon
Input: a polygon P and a point q.
Output: the unit-length vector u tangent at point q to the polygon P in the following sense: (i) if q is closest to a segment of the polygon, then u should be parallel to the segment, (ii) if q is closest to a vertex, then u should be tangent to a circle centered at the vertex that passes through q, and (iii) the tangent should lie in the counter-clockwise direction.
Using Matlab
function [u] = v_pp(P,Q)
n = length(P);
i = 1;
d = [];
%Finding shortest dist from 1->n
while i < n
A = [P(i,1) P(i,2)];
B = [P(i+1,1) P(i+1,2)];
Q = [Q(1,1) Q(1,2)];
AB = norm(A - B);
AQ = norm(A - Q);
BQ = norm(B - Q);
if dot(A - B, Q - B) • dot(B - A, Q - A) >= 0
X = [A,1;B,1;Q,1];
x = sym(X);
distance - abs(det(x))/AB;
else
distance = min(AQ,BQ);
end
d(1,i) = distance;
i = i + 1;
end
%Find dist from n->1
A = [P(1,1) P(1,2)];
B = [P(n,1) P(n,2)];
Q = [Q(1,1) Q(1,2)];
AB = norm(A - B);
AQ = norm(A - Q);
BQ = norm(B - Q);
if dot(A - B,Q - B) • dot(B - A, Q - A) >= 0
X = [A,1;B,1;Q,1];
x = sym(X);
distance = abs(det(x))/AB;
else
distance = min(AQ,BQ);
end
d(1,n) = distance;
distance = min(d);
f = find(ismember(d,distance), 1);
if f == n;
g = 1;
else
g = f + 1;
end
x1 = P(f,1) - Q(1,1);
y1 = P(f,2) - Q(1,2);
x2 = P(g,1) - Q(1,1);
y2 = P(g,2) - Q(1,2);
c1 = sqrt(x1^2 + y1^2);
c2 = sqrt(x2^2 + y2^2);
l1 = sqrt((P(f,1) - P(g,1))^2 + (P(f,2) - P(g,2))^2);
if distance ~= c1 & distance ~= c2;
l2 = sqrt(c2^2 - distance^2);
xcenter = l2/l1 • (x1 - x2);
ycenter = l2/l1 • (y1 - y2);
center = [P(g,1) + xcenter,P(g, 2) + ycenter];
x3 = center(1,1) - Q(1,1);
y3 = center(1,2) - Q(1,2);
u = [y3,-x3];
u = u/distance;
elseif c1 < c2
u = [y1,-x1];
u = u/distance;
elseif c2 < c1
u = [y2,-x2];
u = u/distance;
end
%Check if length = 1
%u(1,1)^2 + u(1,2)^2
end
The Bug0 Algorithm
- while not at goal:
- move towards the goal
- if hit an obstacle:
- while not able to move towards the goal:
- follow the obstacle’s boundary moving to the left
Unfortunately, Bug0 algorithm does not work properly in the sense that there are situations (workspace, obstacles, start and goal positions) for which there exists a solution (a path from start to goal) but the Bug0 algorithm does not find it.
The Bug1 Algorithm
- while not at goal:
- move towards the goal
- if hit an obstacle:
- circumnavigate it(moving to the left or right is unimportant). While circumnavigating, store in memory the minimum distance from the obstacle boundary to the goal
- follow the boundary back to the boundary point with minimum distance to the goal
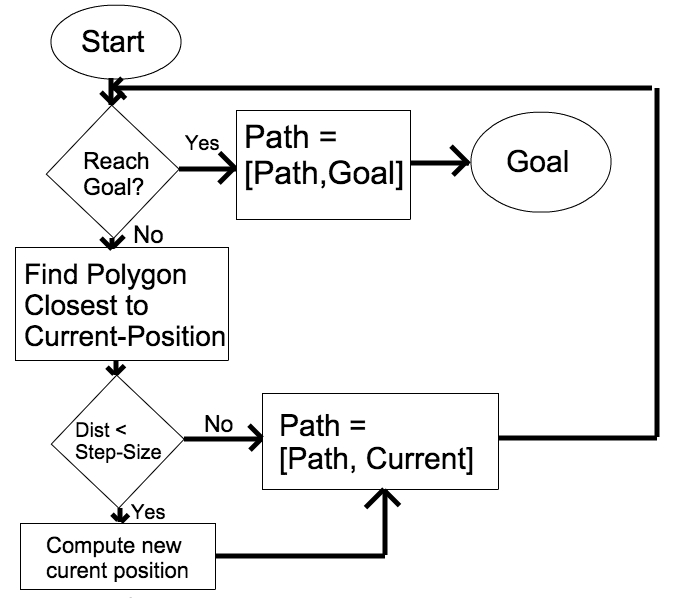
Flowcharts
- Circles represent the start and terminating points
- Arrows indicate the flow of control
- Rectangles represent a single command
- Diamonds output 2 paths based on binary question
Sketch a flowchart and implement the BugBase algorithm.
The BugBase Algorithm
Input: Two locations start and goal in W, a list of polygon obstacles obstaclesList, and a length step-size l.
Output: A sequence, denoted path, of points from start to the first obstacle between start and goal (or from start to goal if no obstacle lies between them). Successive points are separated by no more than step-size.
- current-position = start
- path = [start]
- while distance(current-position,goal) > step-size:
- find polygon closest to current-position
- if distance from current-position to closest polygon < step-size:
- return “Failure: There is an obstacle lying between the start and goal” and path
- compute new current-position by taking a step of length step-size towards goal
- path = [path,current-position]
- path = [path,goal]
- return “Success” and path
Compute Bug1
Input: Two locations start and goal in W, a list of polygonal obstacles obstacleList, and a length step-size
Output: A sequence, denoted path, of points from start to goal or returns an error message if such a path does not exists. Successive points are separated by no more than step-size and are computed according to the Bug 1 algorithm.
Using Matlab
function [path] = Bug_One(S,G,O,Step)
%S = starting point, G = goal point, O = obstacles, Step = Step Size
t = 0;
%Check if solvable or not
i = 1;
l = length (O);
start = [];
goal = [];
while i < l;
[st] = inpolygon(S(1,1),S(1,2),(O{1,i}(:,1)),(O{1,i}(:,2)));
[go] = inpolygon(G(1,1),G(1,2),(O{1,i}(:,1)),(O{1,i}(:,2)));
i = i + 1;
start = [start,st];
goal = [goal,go];
end
if sum(start) > 0;
disp('Failure: Start Point in Polygon');
path = Nan;
return;
elseif sum(goal) > 0;
disp('Failure: Goal Point in Polygon');
path = Nan;
return;
else
%Implement Bug 1 Algorithm
current = S;
path = [S];
total = [];
while norm(G-current) > Step;
%Find the Closest polygon to S
j = 1;
Sclosest = [];
while j <= l;
P = O{i,j};
Q = S;
[distance] = d_pp(P,Q);
Sclosest = [Sclosest,distance]; %Matrix dist S to Polygons
j = j + 1;
t = t + 1;
end
%Find the Closest Polygon toG
jj = 1;
Gclosest = [];
while jj <=l;
P = O{1,jj};
Q = G;
[distance = d_pp(P,Q)];
Gclosest = [Gclosest, distance]; %Matrix dist G to polygons
jj = jj + 1;
t = t + 1;
end
while sum(Sclosest) < 200;
%Getting Phit
temp = min(Sclosest);
[row,col] = find(Sclosest = temp);
spot = col;
k = 1;
Oalt = [O{1,spot}; O{1,spot}(1,:)];
xbox = [];
ybox = [];
while k <= (length(Oalt));
xbox = [xbox,Oalt(k,1)];
ybox = [ybox,Oalt(k,2)];
k = k + 1;
t = t + 1;
end
[xi,yi] = polyxpoly([current(1,1) G(1,1)],[current(1,2) G(1,2)], xbox, ybox);
Phit = [xi(1,1) yi(1,1)];
path = [path; Phit];
total = [total, norm(Phit-current)];
current = Phit;
%Getting Pleave
k = ((Oalt(1,2)-Oalt(3,2))•(G(1,1)-Oalt(3,1))-(Oalt(1,1)-Oalt(3,1))•(G(1,2)-Oalt(3,2))/((Oalt(1,2)-Oalt(3,2))^2+(Oalt(1,1)-Oalt(3,1))^2);
x4 = G(1,1) - k • (Oalt(1,2) - Oalt(3,2));
y4 = G(1,2) + k • (Oalt(1,1) - Oalt(3,1));
Pleave = [x4,y4];
%Going around Polygon
r = 1;
Z = O{1,spot};
Z = sortrows(Z,2);
while r <= length(O{1,spot});
path = [path,Z(r,:)];
total = [total,norm(Z(r,:) - current)];
current = Z(r,:);
r = r + 1;
end
path = [path; Phit];
total = [total, norm(Phit-current)];
current = Phit;
r = 1;
Z = [Z;Pleave];
Z = sortrows(Z,2);
while r < length(Z);
path = [path;Z(r,:)];
total = [total,norm(Z(r,:) - current)];
current = Z(r,:);
r = r + 1;
t = t + 1;
end
Sclosest(1,spot) = 101;
Gclosest(1,spot) = 0;
t = t + 1;
end
total = [total,norm(G - current)];
path = [path;G];
current = G;
total = sum(total);
t = t + 1;
end
end
hold on
%axis ([0 10 0 10])
plot(path(:,1),path(:,2))
end
Testing Bug1 Algorithm:
start = (0,0) and goal = (5,3)
step-size = 0.1 obstacleList = {(1,2),(1,0),(3,0)}, {(2,3),(4,1),(5,2)}
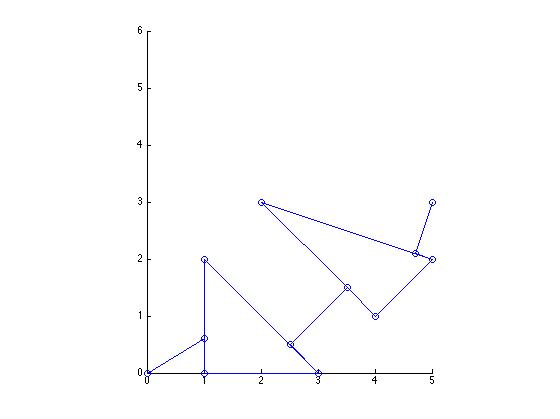
Path: (0,0)->(1,0.6)->(1,0)->(3,0)->(1,2)->(1,0.6)->(1,0)->(3,0)->(2.5,0.5)->(3.5,1.5)->(4,1)->(5,2)->(2,3)->(3.5,1.5)->(4,1)->(5,2)->(4.7,2.1)->(5,3)
Total Path Length: 23.5071
Time: 21
Bug2.prelim Algorithm
- while not at goal:
- move towards the goal (along the start-goal-line)
- if hit an obstacle:
- follow the obstacle’s boundary (moving either left or right), until you encounter the start-goal-line again and are able to move towards the goal
This algorithm may cause the path to be longer than needed. For convenience we repeat the entire algorithm, but the only difference is the addition of the requirement that the leave point be closer to the goal than the hit point!
The Bug2 Algorithm
- while not at goal:
- move towards the goal (along the start-goal-line)
- if hit an obstacle:
- follow the obstacle’s boundary (the turn direction is irrelevant), until you encounter the start-goal-line again closer to the goal and are able to move towards the goal
2. Motion Planning via Decomposition and Search
Robot Assumptions
- knows the start and goal locations, and
- knows the workspace and obstacles
World Assumptions
- the workspace is a bounded polygon
- there are only a finite number of obstacles that are polygons inside the workspace, and
- the start and goal points are inside the workspace and outside all obstacles
The amount of time it takes for a motion planning algorithm to run, call it’s run-time rather than the length of the path it produces. The run-time of an algorithm is given by the number of computer steps required to execute the code.
Decomposition into convex subsets
For complex non-convex environments, we use an algorithm to decompose the free workspace into the union of convex subsets, such as triangles, convex quadrilaterals or trapezoids. The following nomenclature is convenient:
(i) the triangulation of the polygon is the decomposition of the polygon into a collection of triangles, and
(ii) the trapizoidation of the polygon is the decomposition of the polygon into a collective of trapezoids
The Sweeping Trapezoidation Algorithm
Input: a polygon possibly with polygonal holes
Output: a set of disjoint trapezoids, whose union equals the polygon
- initialize an empty list T of trapezoids
- order all vertices (of the obstacles and of the workspace) horizontally from left to right
- for each vertex selected in a left-to-right sweeping order:
- extend vertical segments upward and downwards from the vertex until they intersect an obstacle or the workspace boundary
- add to T the new trapezoids, if any, generated by these segment(s)
Three key ideas we covered so far:
(1) convexity leads to very simple paths, (2) if the free workspace is not convex, it is easy to navigate between neighboring convex sets, (3) a complex free workspace can be decomposed into convex subsets via, for example, the sweeping trapezoidation algorithm.
The next observation is that the sweeping trapezoidation algorithm can easily be modified to additionally provide a list of neighborhood relationships between trapezoids.
The Roadmap-from-Decomposition Algorithm
Input: the trapezoidation of a polygon (possibly with holes)
Output: a roadmap
- label the center of each trapezoid with the symbol ♢
- label the midpoint of each vertical separating segment with the symbol ♦
- for each trapezoid:
- connect the center to all the midpoints in the trapezoid
- return the roadmap consisting of centers, midpoints and their connections
The Planning-via-Decomposition + Search Algorithm
Input: free workspace Wfree, start point pstart and goal point pgoal
Output: a path from pstart to pgoal if it exists, otherwise a failure notice. Either outcome is obtained in finite time.
- compute a decomposition of Wfree and the corresponding roadmap
- in the decomposition, find the start trapezoid containing pstart and the goal trapezoid containing pgoal
- in the roadmap, search for a path from start trapezoid to goal trapezoid
- if no path exists from start trapezoid to goal trapezoid
- return failure notice
- else
- return path by concatenating:
the segment from pstart to the center of start trapezoid
the path from the start trapezoid to goal trapezoid
the segment from the center of goal trapezoid to pgoal
The breadth-first search algorithm, also called BFS algorithm, is one of the simplest graph search strategy and is optimal in the sense that it computes shortest paths.
The breadth-first search (BFS) algorithm
Input: a graph G, a start node vstart and goal node vgoal
Output: a path from vstart to vgoal if it exists, otherwise a failure notice
- create an empty queue Q and insert (Q,vstart)
- for each node v in G:
- parent(v) = NONE
- parent(vstart) = SELF
- while Q is not empty:
- v = retrieve(Q)
- for each node u connected to v by an edge:
- if parent(u) == NONE:
- set parent(u) = v and insert (Q,u)
- if u == vgoal:
- run extract-path algorithm to compute the path from start to goal
- return success and the path from start to goal
- return failure notice along with the parent pointers
The extract-path algorithm
Input: a goal node vgoal, and the parent pointers
Output: a path from vstart to vgoal
- create an array P = [vgoal]
- set u = vgoal
- while parent(u) ≠ SELF:
- u = parent(u)
- insert u at the beginning of P
- return P
computeBFStree
Input: a graph described by its adjacency table AdjTable, a start node start
Output: a vector of pointers parents describing the BFS tree rooted at start
Using Matlab
function [BFStree] = computeBFStree (AdjTable, start)
% Insert AdjTable as a [:,2] Matrix
s = AdjTable(:,1);
t = AdjTable(:,2);
l = length(AdjTable);
Q = [];
Q = [start,Q];
BFStree = [];
while isempty(Q) ~= 1
pos1 = find(s == Q(1));
pos2 = find(t == Q(1));
adj1 = t(pos1);
adj2 = s(pos2);
adj = sort([adj1' adj2']);
i = length(Q);
j = length(BFStree);
for n = 1:i
del = find(adj == Q(n));
adj(del) = [];
end
for m = 1:j
del = find(adj == BFStree(m));
adj(del) = [];
end
Q = [Q adj];
if (Q(1) == BFStree) > 0
Q(1) = [];
else
BFStree = [BFStree Q(1)];
Q(1) = [];
end
end
end
3. Configuration Spaces
- describe a robot as a single or multiple interconnected rigid bodies,
- define the configuration space of a robot,
- examine numerous example configuration spaces,
- discuss forward and inverse kinematic maps
Some simple concepts:
(i) a rigid body is a collection of particles whose position relative to one another is fixed,
(ii) a robot is composed of a single rigid body or multiple interconnected rigid bodies,
(iii) robots are 3-dimensional in nature, but we focus on plane problems for now.
(iv) it is equivalent to specify
Example Systems:
- Disk robo- has the shape of a disk and is characterized by just one parameter, its radius r > 0. The disk robot does not have an orientation. Accordingly, the disk robots only motion is translation in the plane: that is, translations in the horizontal and vertical directions.
- Translating polygon robot- has a polygonal shape. This robot is assumed to have a fixed orientation, and thus it’s only motion is translations in the plane.
- Roto-translation polygon robot- has an arbitrary polygonal shape, is capable of translating in the horizontal and vertical directions as well as rotating.
- Multi-link or multi-body robot- composed of multiple rigid bodies (or links) interconnected. Each link of the robot can rotate and translate in the plane, but these motions are constrained by connections to the other links and to the robot base.
Configuration Space
- A configuration of a robot is a minimal set of variables that specifies the position and orientation of each rigid body composing the robot. The robot configuration is usually denoted bye the letter q
- The configuration space is the set of all possible configurations of a robot. The robot configuration space is usually denoted by the letter Q, so that q ∈ Q.
- The number of degrees of freedom of a robot is the dimension of the configuration space, i.e., the minimum number of variables required to fully specify the position and orientation of each rigid body belonging to the robot.
- Given that the robot is at configuration q, we know where all points of the robot are.
4. Free Configuration Spaces via Sampling and Collision Detection
- represent obstacles and the free space when the robot is composed of a single or multiple rigid bodies with proper shape, position and orientation
- compute free configuration spaces via sampling and collision detection,
- discuss sampling methods
- discuss collision detection methods
Free configuration space for the disk robot
To compute the free configuration space and the obstacles in configuration space we reason as follows: a disk with radius r in collision with an obstacle if and only if the disk center is closer to the obstacle than r. Accordingly, we grow or “expand” the obstacle and, correspondingly, to “shrink” the workspace.
Using this key idea, the obstacle in configuration space is the expanded rectangle and the free configuration space of the disk robot is described in any of the two completely equivalent forms:
(i) the set of points of the disk center such that the disk does not intersect the obstacle and is inside the workspace,
(ii) the shrunk workspace minus the expanded obstacle.
Free configuration space for the translating polygonal robot
There is a simple graphical approach to computing the configuration space obstacle:
(i) move the robot to touch the obstacle boundary (recall the robot is not allowed to rotate),
(ii) slide the robot body along the obstacle boundary, maintaining the contact between the robot boundary and the obstacle boundary,
(iii) while sliding, store the location of the reference point of the robot: the resulting path encloses a convex polygon equal to the configuration space obstacle.
Sampling Methods
A sampling method should have certain properties:
- Uniformity: the samples should provide a “good covering” of space. Mathematically, this can be formulated using the notion of dispersion
- Incremental property: the sequence of samples should provide good coverage at any number n of samples. In other words, it should be possible to increase n continuously and not only in discrete large amounts.
- Lattice structure: given a sample, the location of nearby samples should be computationally easy to determine.
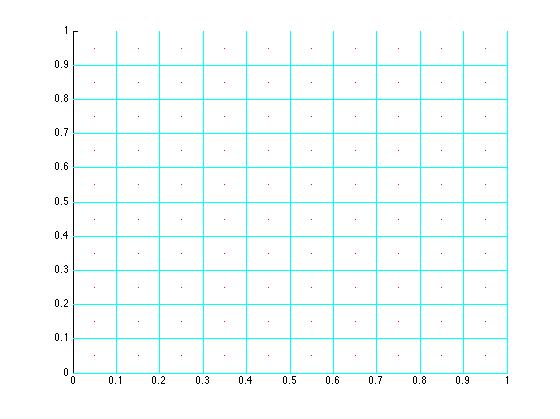
Uniform grids There are two ways of defining uniform grids in the unit cube. We call them the center grid and the corner grid. Both grids with n points can be defined if n = kd for some number k.
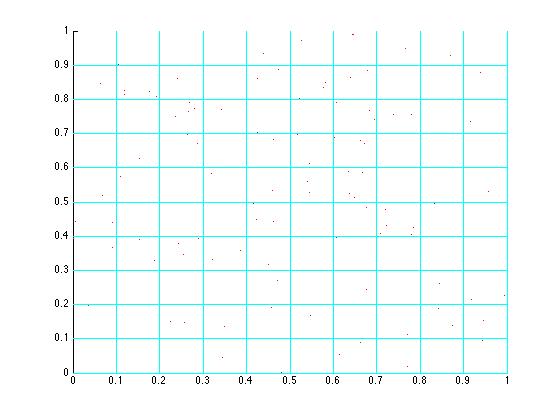
Random and pseudo-random sampling Adopting a random number generator is usually a very simple approach to (uniformly or possibly non-uniformly) sample the cube. Randomly-sampled points have asymptotically worse dispersion than center grids.
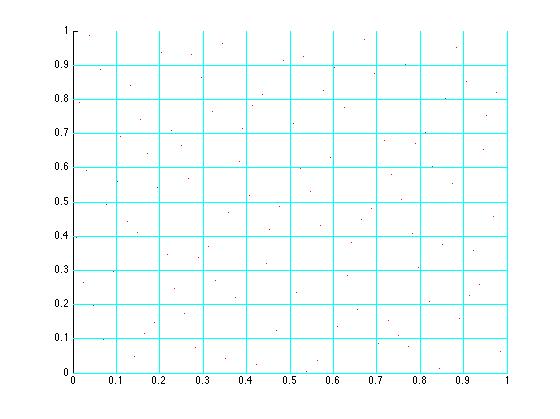
Halton sequences are an elegant way of sampling an interval with good uniformity (better than a pseudorandom sequence, though not as good as the optimal center grid) and with the incremental property (which the center grid does not posses).
The Halton sequence algorithm
Input: length of the sequence N ∈ N and prime number p ∈ N
Output: an array S[1…N] with the first N samples of the Halton sequence generated by p
- initialize: S to be an array of N zeros
- for each i from 1 to N:
- initialize: itmp = i, and f = 1/p
- while itmp > 0:
- compute the quotient q and the remainder r of the division itmp/p
- S(i) = S(i) + f • r
- itmp = q
- f = f/p
- return S
Collision detection methods
The next step is to detect whether or not these configurations are in collision with an obstacle or workspace boundary. To do this we require several collision detection methods.
Basic primitive #1: is a point in a convex polygon?
Given a convex polygon with counter-clockwise vertices and a point q, the following conditions are equivalent:
(i) the point q is in the polygon (possibly on the boundary)
(ii) for all i ∈ {1,…,n}, the point q belongs to the halfplane with boundary line passing through the vertices pi and pi+1 and containing the polygon
(iii) for all i ∈ {i,…,n}, the dot product between the interior normal to the side pipi+1 and the segment piq is positive or zero.
(Here the convention is that pi+1 = p1. A similar set of results can be given to check that the point is strictly inside the polygon.)
Basic primitive #2: do two segments intersect?
Any two lines in the plane are in one of three exclusive configurations: (1) parallel and coincident, (2) parallel and distinct, or (3) intersecting at a single point. In order for two segments to intersect, the two corresponding lines may be coincident (and the two segments need to intersect at least partly) or may intersect at a point (and the point must belong to the two segments). Now, if the two lines intersect at a point, one still needs to check that the intersection point actually belongs to the segment.
Basic primitive #3: do two convex polygons intersect?
There are five possible cases that one must consider, and each is illustrated below.
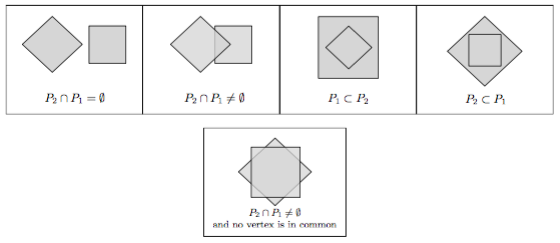
The convex-polygon-intersection algorithm
Input: two convex polygons P1 and P2
Output: collision or no collision
- if (any vertex of P1 belongs to P2) OR (any vertex of P2 belongs to P1):
- return collision
- if any edge of P1 intersects any edge of P2:
- return collision
- return no collision
Given conditions:
Consider the unit square [0,1]2 in the plane. Pick an arbitrary integer k and do:
- write formulas for the n = k2 sample points in the uniform Sukharev center grid;
- write formulas for the n = k2 sample points in the uniform corner grid;
- write the following programs (representing a grid with n entries in [0,1]2 by a matrix with n rows and 2 columns):
computeGridSukharev
Input: the number of samples n (assuming n = k2 for some integer number k)
Output: the uniform Sukharev center grid on [0,1]2 with [n1/2] samples along each axis
Using Matlab
function [xpoints, ypoints] = GridSukharev(n)
k = sqrt(n);
if k ~= round(k);
display 'Cannot Create Sukharev Grid';
return;
end
%Change Parameters [0 1]^2 or [0 2*pi]^2
x = 0:2 • pi/k:2 • pi;
y = 0:2 • pi/k:2 • pi;
[xx,yy] = meshgrid(x,y);
xsize = size(xx);
ysize = size(yy);
i = 1;
xmid = [];
ymid = [];
temp = [];
while i < xsize(1,1);
j = 1;
while j < xsize(1,2);
xmid = [xmid (xx(i,j+1)+xx(i,j))/2];
j = j + 1;
end
temp = [xmid(1:(xsize-1)); temp];
i = i + 1;
end
xmid = temp;
i = 1;
temp = [];
while i < ysize(1,2);
j = 1;
while j < ysize(1,1);
ymid = [ymid (yy(j+1,i)+yy(j,i))/2];
j = j + 1;
end
temp = [temp;ymid(1:(ysize - 1))];
i = i + 1;
end
ymid = temp';
%Uncomment for plots
%hold on;
%axis equal;
%plot(xx,yy,'c');
%plot(xx',yy','c');
%plot(xmid,ymid,'r.')
xpoints = xmid;
ypoints = ymid;
end
Testing GridSukharev(100)
computeGridRandom
Input: the number of samples n
Output: the random grid on [0,1]2 with n uniformly-generated samples
Using Matlab
function [xpoints,ypoints] = GridRandom(n)
k = sqrt(n);
r = randi(6,k,2);
x = r(:,1);
y = r(:,2);
if k != round(k);
display 'Cannot Create Grid';
return;
end
%Chagne Parameters [0 1]^2 or [0 2*pi]^2
xx = 0:2 • pi/k:2 • pi;
yy = 0:2 • pi/k:2 • pi;
[xxx,yyy] = meshgrid(xx,yy);
%hold on
%axis([0 1 0 1])
%plot(x,y,'r.');
%plot(xxx,yyy,'c');
%plot(xxx',yyy','c');
xpoints = x;
ypoints = y;
end
Testing GridRandom(100)
computeGridHalton
Input: the number of samples n; two prime numbers b1 and b2
Output: a Halton sequence of n samples inside [0,1]2 generated by the prime numbers b1 and b2
Using Matlab
function [xpoints,ypoints] = GridHalton(n,b1,b2)
k = sqrt(n);
if k ~= round(k);
display 'Cannot Create Grid';
return;
end
S = zeros(1,n);
for i = 1:n;
itemp = i;
f = 1/b1;
while itemp > 0;
n1 = floor(itemp/b1);
r = itemp - n1 • b1;
S(i) = S(i) + f r;
f = f/b1;
itemp = n1;
end
end
T = zeros(1,n);
for i = 1:n;
itemp = i;
f = 1/b2
while itemp > 0;
n1 = floor(itemp/b2);
r = itemp - n1 • b2;
T(i) = T(i) + f • r;
f = f/b2;
itemp = n1;
end
end
xx = 0:1/k:1;
yy = 0:1/k:1;
[xxx,yyy] = meshgrid(xx,yy);
xsize = size(xxx);
ysize = size(yyy);
%hold on;
%axis([0 1 0 1]);
%plot(S,T,'r.');
%plot(xxx,yyy,'c');
%plot(xxx',yyy','c');
xpoints = S;
ypoints = T;
end
Testing GridHalton(100,2,3)
isPointInConvexPolygon
Input: a point q and a convex polygon P
Output: true(1) or false(0)
Using Matlab
function PointInConvexPolygon(q,P)
%1 = True
%0 = False
n = length(P);
P = [P;P(1,:);P(2,:)];
S = [];
Z = [];
for i = 1:n;
v1 = P(i,:);
v2 = P(i + 1,:);
v3 = P(i + 2,:);
m = (v2(2) - v1(2))/(v2(1) - v1(1));
if m == inf || m == -inf
if v3(1) > v1(1)
v = [1;0];
else
v = [-1;0];
end
elseif m ==0
if v3(2) > v1(2)
v = [0;1];
else
v = [0;-1];
end
else
b = v1(2) - m • v1(1);
mp = -1/m;
%Compute Midpoint
vm = [v1(1) + v2(1);v1(2) + v2(2)]/2;
%Perpendicular Line
bp = vm(2) - mp • vm(1);
%Compute Inner Versor
v4 = [vm(1) + 1;mp • (vm(1) + 1) + bp];
%Check if v4 is on the inner side of the polygon
if (v3(2) > m • v3(1) + b) && (v4(2) < m • v4(1) + b)
v4 = [vm(1) - 1;mp • (cm(1) - 1) + bp];
end
v = v4 - vm;
v = v/norm(v);
end
r = q - v1;
Q = dot(r,v);
Z = [Z Q]
v
end
if any(Z(:) < 0);
0;
else
1;
end
end
The point q should be inputted as a matrix [x,y]. The polygon will be inputted by one matrix but with all the points, such as [x1 y1;x2 y2;…;xn yn].
PointInConvexPolygon([2 2],[0 0;3 0;3 3;0 3])
1
PointInConvexPolygon([2 4],[0 0;3 0;3 3;0 3])
0
doTwoSegmentsIntersect
Input: two segments described by their respective vertices p1,p2,and p3, p4
Output: true(1) or false(0). If true, then return also the intersection point
Using Matlab
function TwoSegmentsIntersect (p1,p2,p3,p4)
x1 = p1(1);
y1 = p1(2);
x2 = p2(1);
y2 = p2(2);
x3 = p3(1);
y3 = p3(2);
x4 = p4(1);
y4 = p4(2);
num = (x4 - x3) • (y1 - y3) - (y4 - y3) • (x1 - x3);
den = (y4 - y3) • (x2 - x1) - (x4 - x3) • (y2 - y1);
if num == 0 && den ==0
display '0'
elseif den == 0
desplay '0'
else
sa = num/den;
sb = (x1 - x3 + sa • (x2 - x1))/(x4 - x3);
if sa < 0 | sb < 0
display '0'
return
elseif sa > 1 | sb > 1
display '0'
return
end
line1 = [x1 y1;x2 y2];
line2 = [x3 y3;x4y4];
m1 = (line1(2,2) - line1(1,2))/(line1(2,1) - line1(1,1));
m2 = (line2(2,2) - line2(1,2))/(line2(2,1) - line2(1,1));
b1 = line1(1,2) - m1 • line1(1,1);
b2 = line2(1,2) - m2 • line2(1,1);
xinter = (b2 - b1)/(m1 0 m2);
yinter = m1 • xinter + b1;
display '1'
Intercept = sprintf( '(%d,%d)',xinter,yinter);
display(Intercept)
end
end
The points p1 and p2 will create the first segment while p3 and p4 creawte the second segment. The order in which you choose doesn’t matter; so you can technically input p2’s point as p1 and p1’s point as p2. If the output is ‘1’ then there is an intercept output. However, if the output is ‘0’ then there is no intersection output displayed.
TwoSegmentsIntersect([1 1],[3 3].[1 3],[3 1])
1
Intercept =
(2,2)
TwoSegmentsIntersect([0 0],[2 3],[4 1],[0 5])
1
Intercept =
(2,3)
TwoSegmentsIntersect([0 0],[3 0],[3 1],[5 5])
0
doTwoConvexPolygonsIntersect
Input: two convex polygons P1 and P2
Output: true(1) or false(0)
Using Matlab
function TwoConvexPolygonsIntersect (P1,P2)
S = [];
n = length(p1);
m = length(p2);
P1 = [P1;P1(1,:)];
P2 = [P2;P2(1,:)];
for i = 1:n;
for j = 1:m;
x1 = P1(i,1);
y1 = P1(i,2);
x2 = P1(i + 1,1);
y2 = P1(i + 1,2);
x3 = P2(j,1);
y3 = P2(j,2);
x4 = P2(j + 1,1);
y4 = P2(j + 1,2);
num = (x4 - x3) • (y1 - y3) - (y4 - y3) • (x1 - x3);
den = (y4 - y3) • (x2 - x1) - (x4 - x3) • (y2 - y1);
if num == 0 && den == 0
S = [S 0];
elseif den == 0
S = [S 0];
else
sa = num/den;
sb = (x1 - x3 + sa • (x2 - x1))/(x4 - x3);
if sa < 0 | sb < 0
S = [S 0];
elseif sa > 1 | sb > 1
S = [S 0];
else
S = [S 1];
end
end
end
end
if sum(S) > 0
display '1'
elseif sum(S) == 0
display '0'
end
end
The polygons are inputted just like usual, [x1 y1;x2 y2;…;xn yn].
TwoConvexPolygonsIntersect([0 0;0 2;2 2;2 0],[1 1;1 3;3 3;3 1])
1
TwoConvexPolygonsIntersect([0 0;0 1;1 1;1 0],[2 0;2 1;3 1;3 0])
0
TwoConvexPolygonsIntersect([0 0;1 3;1 0],[1 0;2 0;2 2])
1
5. Motion Planning via Sampling
- general roadmaps and their desirable properties
- complete planners based on exact roadmap computation
- general-purpose planners based on sampling and approximate roadmaps. For this general-purpose planners we will discuss:
- connection rules for fixed resolution grid-based roadmaps,
- connection rules for arbitrary-resolution methods,
- comparison between sampling-based approximate and exact planners
- incremental sampling-based approximate and exact planners
- from multi-query to single-query,
- rapidly-exploring random trees (RRT)
- the application of receding-horizon incremental planners to sensor-based planning.
- Appendix: shortest-path planning via visibility roadmap and shortest path search via Dijkstra’s algorithm.
Roadmaps
A roadmap may have the following properties:
(i) the roadmap is accessible if, for each point qstart in Qfree, there is an easily computable path from qstart to some node in the roadmap,
(ii) similarly, the roadmap is departable if, for each point qgoal in Qfree, there is an easily computable path from some node in the roadmap to qgoal,
(iii) the roadmap is connected if, as in graph theory, and two locations of the roadmap are connected by a path in the roadmap,
(iv) the roadmap is efficient with factor δ ≥ 1 if, for any two locations in the eroadmap, say u and v, the path length from u to v along edges of the roadmap is no longer than δ times the length of the shortest path from u to v in the environment.
Visibility Roadmaps
(i) the nodes V of the visibility graph are all convex vertices of the polygons O1, …, On,
(ii) the edges E of the visibility graph are all pairs of vertices that are visibly connected. That is, given two nodes u and v in V, we add the edge {u,v} to the edge set E if the straight line segment between u and v is not in collision with any obstacle
(iii) the edge weight of an edge {u,v} is given by the length of the segment connecting u and v
The sampling-based roadmap computation algorithm
Input: number of sample points in roadmap N ∈ N. Requires access to a sampling algorithm, collision detection algorithm, and a notion of neighborhood in Q
Output: a roadmap (V,E) for the free configuration space Qfree
- initialize (V,E) for the free configuration space Qfree
// compute a set of locations V in Qfree, via sampling & collision detection- while number of nodes in V is less than N:
- compute a new sample q in the configuration space Q
- if the configuration q is collision-free:
- add q to V
// compute a set of paths E via the following connection rule- for each sampled location q in V:
- for all other sampled locations p in a neighborhood of q:
- if the path from q to p hits no obstacle:
- add the path q to p to E
- return (V,E)
Neighborhood functions
There are many possible choices in deciding which sample configuration p to try to connect to q.
(i) r-radius rule: fix a radius r > 0 and select all locations p within distance r of q.
(ii) K-closest rule: select the K closest locations p to q.
(iii) component-wise K-closest rule: from each connected component of the current roadmap, select the K closest location p to q.
Roadmap-based methods are structured in general as a two-phase computation process consisting of
(i) a preprocessing phase - given the free configuration space, compute the roadmap, followed by
(ii) a query phase - given start and goal locations, connection them to the roadmap and search the resulting graph.
The roadmap is:
(i) computed directly as a function of the start location
(ii) is just a tree, as cycles do not add new paths from the start location
The Incremental tree-roadmap computation method
Input: start location qstart, number of sample points in tree roadmap N ∈ N. Also requires access to a sampling algorithm, collision detection algorithm, and a distance notion on Q
Output: a tree roadmap (V,E) for the free configuration space Qfree containing qstart
- initialize (V,E) to contain the start location qstart and no edges
- while number of nodes in V is less than N:
- select a node qexpansion from V for expansion
- choose a collision-free configuration qnearby near qexpansion
- if can find a collision-free path from qexpansion to qnearby:
- add qnearby to V
- add collision-free path from qexpansion to qnearby to E
- return (V,E)
A graph is weighted if a positive number, called the weight, is associated to each edge. In motion planning problems, the edge weight might be a distance between locations, a time required to travel or a cost associated with the travel. The weight of a path is the sum of the weights of each edge in the path.
The minimum-weight path between two nodes, also called the shortest path in a weight graph, is a path of minimum weight between the two nodes.
Informal description: For each node, maintain a weighted distance estimate from the source, denoted by dist. Incrementally construct a tree that contains only shortest paths from the source. Starting with an empty tree, at each round, add to the tree (1) the node outside the tree with smallest dist, and (2) the edge corresponding to the shortest path to this node. The estimates dist are updated as follows: when a node is added to the tree, the estimates of the neighboring outside nodes are updated (see details below). The tree is stored using parent pointers that for each node u record the node immediately before u on the shortest path from the source to u.
Dijkstra’s Algorithm
Input: a weighted graph G and a start node nstart
Output: the parent pointer and dist values for each node in the graph G
//Initialization of distance and parent pointer for each node
- for each node v in G:
- dist(v) = +∞
- parent(v) = NONE
- dist(vstart) = 0
Q</cite> = set of all nodes in G
//Main loop to grow the tree and update distance estimates- while Q is not empty:
- find node v in Q with smallest dist(v)
- remove v from Q
- for each node w connected to v by an edge:
- if dist(w) > dist(v)+weight(v,w):
- dist(w) = dist(v) = weight(v,w)
- parent(w) = v
- return parent pointers and dist values for all nodes v
plotEnvironment
Input: L1,L2,W,α,β,(xo,yo),r ,
Output: the function plots the two-link manipulator defined by L1,L2,W,α,β, and the obstacle defined by (xo,yo)
Using Matlab
function plot_env(L1,L2,W,alpha,beta,O,r)
%Change angles to degrees
alpha = alpha • 180/pi;
beta = beta • 180/pi;
charlie = alpha + beta;
A = W/2 • sind(alpha);
B = W/2 • cosd(alpha);
C = W/2 • sind(charlie);
D = W/2 • cosd(charlie);
%Rectangles
rx1 = [-A -A+L1•cosd(alpha) A+L1•cosd(alpha) A -A];
ry1 = [B B+L1•sind(alpha) -B+L1•sind(alpha) -B B];
rx2 = [-C+L1•cosd(alpha) -C+L1•cosd(alpha)+L2•cosd(charlie) C+L1•cosd(alpha)+L2•cosd(charlie) C+L1•cosd(alpha) -C+L1•cosd(alpha)];
ry2 = [D+L1•sind(alpha) D+L1•sind(alpha)+L2•sind(charlie) -D+L1•sind(alpha)+L2•sind(charlie) -D+L1•sind(alpha) D+L1•sind(alpha)];
%Plot Points
hold on;
plot(0,0,'c.')
plot(L1•cosd(alpha),L1•sind(alpha),'c.')
plot(L1•cosd(alpha)+L2•cosd(charlie),L1•sind(alpha)+L2•sind(charlie),'c.')
plot(O(1,1),O(1,2),'c.')
%Plot Rectangles
plot(rx1,ry1,'b');
plot(rx2,ry2,'r');
%Plot semi-circles
th1 = linspace(alpha + 270,alpha + 90,100);
th2 = linspace(alpha - 90,alpha + 90,100);
th3 = linspace(charlie + 270,charlie + 90,100);
th4 = linspace(charlie - 90,charlie + 90,100);
thc = linspace(0,360,100);
R = W/2;
x1 = R • cosd(th1) + 0;
y1 = R • sind(th1) + 0;
x2 = R • cosd(th2) + L1 • cosd(alpha);
y2 = R • sind(th2) + L1 • sind(alpha);
x3 = R • cosd(th3) + L1 • cosd(alpha);
y3 = R • sind(th3) + L1 • sind(alpha);
x4 = R • cosd(th4) + L1 • cosd(alpha) + L2 • cosd(charlie);
y4 = R • sind(th4) + L1 • sind(alpha) + L2 • sind(charlie);
xc = r • cosd(thc) + O(1,1);
yc = r • sind(thc) + O(1,2);
plot(x1,y1,'c');
plot(x2,y2,'c');
plot(x3,y3,'g');
plot(x4,y4,'g');
plot(xc,yc,'b');
axis equal;
grid on;
end
checkCollisionTwoLink
Input: L1,L2,Q,α,β,(xo,yo),r
Output: the function returns 1 if the two-link manipulator defined by L1,L2,W,α,β collides with the obstacle defined by (xo,yo) and r. The function returns 0 otherwise.
Using Matlab
function [ans, n] = check_collision(L1, L2, W, alpha, beta, O, r)
%Change angles to degrees
alpha = alpha • 180 / pi;
beta = beta • 180 / pi;
charlie = alpha + beta;
%Create Equations
W = W + 2 • r;
A = W/2 • sind(alpha);
B = W/2 • cosd(alpha);
C = W/2 • sind(charlie);
D = W/2 • cosd(charlie);
%Rectangles
rx1 = [-A -A+L1•cosd(alpha) A+L1•cosd(alpha) A -A];
ry1 = [B B+L1•sind(alpha) -B+L1•sind(alpha) -B B];
rx2 = [-C+L1•cosd(alpha) -C+L1•cosd(alpha)+L2•cosd(charlie) C+L1•cosd(alpha)+L2•cosd(charlie) C+L1•cosd(alpha) -C+L1•cosd(alpha)];
ry2 = [D+L1•sind(alpha) D+L1•sind(alpha)+L2•sind(charlie) -D+L1•sind(alpha)+L2•sind(charlie) -D+L1•sind(alpha) D+L1•sind(alpha)];
%Plot Points
hold on;
plot(0,0,'c.');
plot(L1•cosd(alpha),L1•sind(alpha),'c.');
plot(L1•cosd(alpha)+L2•cosd(charlie),L1•sind(alpha)+L2•sind(charlie),'c.');
plot(O(1,1),O(1,2),'c.','Markersize',20)
%Plot Rectangles
plot(rx1,ry1,'b');
plot(rx2,ry2,'r');
%Plot semi-circles
th1 = linspace(alpha + 270,alpha + 90,100);
th2 = linspace(alpha - 90,alpha + 90,100);
th3 = linspace(charlie + 270,charlie + 90,100);
th4 = linspace(charlie - 90,charlie + 90,100);
R = W/2;
x1 = R • cosd(th1) + 0;
y1 = R • sind(th1) + 0;
x2 = R • cosd(th2) + L1 • cosd(alpha);
y2 = R • sind(th2) + L1 • sind(alpha);
x3 = R • cosd(th3) + L1 • cosd(alpha);
y3 = R • sind(th3) + L1 • sind(alpha);
x4 = R • cosd(th4) + L1 • cosd(alpha) + L2 • cosd(charlie);
y4 = R • sind(th4) + L1 • sind(alpha) + L2 • sind(charlie);
%Turn into Matrix
rx1(end) = [];
ry1(end) = [];
rx2(end) = [];
ry2(end) = [];
%Plot Semi-Circles
plot(x1,y1,'c');
plot(x2,y2,'c');
plot(x3,y3,'g');
plot(x4,y4,'g');
axis square;
grid on
%Check if point is in polygons
if inpolygon(O(1,1), O(1,2), rx1, ry1)
ans = 1;
n = 1;
return;
elseif inpolygon(O(1,1), O(1,2), rx2, ry2)
ans = 1;
n = 2;
return;
elseif inpolygon(O(1,1), O(1,2), x1, y1)
ans = 1;
n = 1;
return;
elseif inpolygon(O(1,1), O(1,2), x2, y2)
ans = 1;
n = 1;
return;
elseif inpolygon(O(1,1), O(1,2), x3, y3)
ans = 1;
n = 2;
return;
elseif inpolygon(O(1,1), O(1,2), x4, y4)
ans = 1;
n = 2;
return;
else
ans = 0;
n = 0;
return;
end
end
plotSampleConfigurationSpaceTwoLink
Input: L1,L2,W,(xo,yo),r,sampling_method,n
Output: the function plots the sampled free configuration space of the two-link manipulator defined by L1,L2,W. In particular, the function (i) determines n sample points in the configuration space according to the sampling method specified in the parameter sampling_method, (ii) draws a black dot at the sample (α,β) if the first link collides with the obstacle, a red dot at the sample (α,β) if the second link collides with the obstacle, and a blue dot otherwise. Use the sampling methods developed.
Using Matlab
% Sample: 'Sukharev', 'Random', 'Halton'
function plot_config(L1, L2, W, O, r, sample, n)
%Check if Sample is available
if strcmp(sample, 'Sukharev') == 0 && strcmp(sample, 'Random') == 0 && strcmp(sample, 'Halton') == 0;
display 'Unknown sample'
return;
end
%Check Sample Size is Correct
k = sqrt(n);
if k ~= round(k);
display 'Cannont Create Grid';
return;
end
temp = [];
%Sukharev Sample
if strcmp(sample,'Sukharev') == 1
[xpoints,ypoints] = GridSukharev(n);
for i = 1:k
for j = 1:k
[~, n] = check_collision(L1,L2,W,xpoints(i,j),ypoints(i,j),O,r);
temp(i,j) = n;
end
end
x = 0:2 • pi/k:2 • pi;
y = 0:2 • pi/k:2 • pi;
[xx,yy] = meshgrid(x,y);
close all;
hold on;
plot(xx,yy,'c');
plot(xx',yy','c');
axis equal;
for i = 1:k
for j = 1:k
if temp(i,j) == 0
plot(xpoints(i,j),ypoints(i,j),'b.','MarkerSize',20)
elseif temp(i,j) == 1
plot(xpoints(i,j),ypoints(i,j),'k.','MarkerSize',20)
elseif temp(i,j) == 2
plot(xpoints(i,j),ypoints(i,j),'r.','MarkerSize',20)
end
end
end
%Random Sample
elseif strcmp(sample,'Random') == 1
[xpoints,ypoints] = GridRandom(n);
for i = 1:k
[~, n] = check_collision(L1,L2,W,xpoints(i,1),ypoints(i,1),O,r);
temp(i,1) = n;
end
x = 0:2 • pi/k:2 • pi;
y = 0:2 • pi/k:2 • pi;
[xx,yy] = meshgrid(x,y);
close all;
hold on;
plot(xx,yy,'c');
plot(xx',yy','c');
axis equal;
for i = 1:k
if temp(i,1) == 0
plot(xpoints(i,1),ypoints(i,1),'b.','MarkerSize',10)
elseif temp(i,1) == 1
plot(xpoints(i,1),ypoints(i,1),'k.','MarkerSize',10)
elseif temp(i,1) == 2
plot(xpoints(i,1),ypoints(i,1),'r.','MarkerSize',10)
end
end
%Halton Sample
elseif strcmp(sample,'Halton') == 1
[xpoints,ypoints] = GridHalton(n,2,3);
for i = 1:k
[~, n] = check_collision(L1,L2,W,xpoints(1,i),ypoints(1,i),O,r);
temp(1,i) = n
end
x = 0:2 • pi/k:2 • pi;
y = 0:2 • pi/k:2 • pi;
[xx,yy] = meshgrid(x,y);
close all;
hold on;
plot(xx,yy,'c');
plot(xx',yy','c');
axis equal;
for i = 1:k
if temp(1,i) == 0
plot(xpoints(1,i),ypoints(1,i),'b.','MarkerSize',10)
elseif temp(1,i) == 1
plot(xpoints(1,i),ypoints(1,i),'k.','MarkerSize',10)
elseif temp(1,i) == 2
plot(xpoints(1,i),ypoints(1,i),'r.','MarkerSize',10)
end
end
end